pi = 3.1415926536;
e = 2.718281828;
/*************************
* Cartesian equations
*************************/
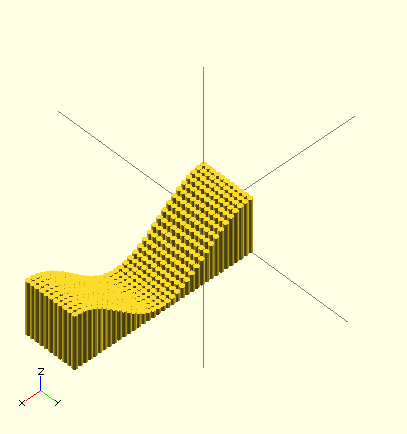
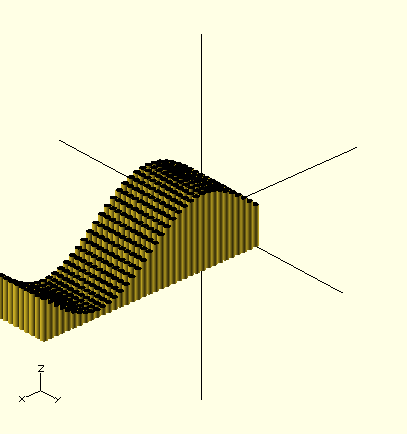
/* Sine wave */
module sineWave(){
linear_extrude(height=5)
2dgraph([-50, 50], 3, steps=50);
}
module parabola (){
linear_extrude(height=5)
2dgraph([-50, 50], 3, steps=40);
}
/* Ellipsoid - use a cartesion equation for a half ellipse,
then rotate extrude it */
module ellipsoid(){
rotate_extrude(convexity=10, $fn=100)
rotate([0, 0, -90])
2dgraph([-50, 50], 3, steps=100);
}
/*************************
* Polar equations
*************************/
/* Rose curve */
module rose(){
scale([20, 20, 20]) linear_extrude(height=0.15)
2dgraph([0, 720], 0.1, steps=160, polar=true);
}
/* Archimedes spiral */
module archimedesSpiral(){
scale([0.02, 0.02, 0.02]) linear_extrude(height=150)
2dgraph([0, 360*3], 50, steps=100, polar=true);
}
/* Golden spiral */
module goldenSpiral(){
linear_extrude(height=50)
2dgraph([0, 7*180], 1, steps=300, polar=true);
}
/**************************
* Parametric equations
*************************/
/* 9-pointed star */
module ninePointedStar(s,h){
scale(s) linear_extrude(height=h)
2dgraph([10, 1450], 0.1, steps=9, parametric=true);
}
/*************************/
// function to convert degrees to radians
function d2r(theta) = theta*360/(2*pi);
// These functions are here to help get the slope of each segment, and use that to find points for a correctly oriented polygon
function diffx(x1, y1, x2, y2, th) = cos(atan((y2-y1)/(x2-x1)) + 90)*(th/2);
function diffy(x1, y1, x2, y2, th) = sin(atan((y2-y1)/(x2-x1)) + 90)*(th/2);
function point1(x1, y1, x2, y2, th) = [x1-diffx(x1, y1, x2, y2, th), y1-diffy(x1, y1, x2, y2, th)];
function point2(x1, y1, x2, y2, th) = [x2-diffx(x1, y1, x2, y2, th), y2-diffy(x1, y1, x2, y2, th)];
function point3(x1, y1, x2, y2, th) = [x2+diffx(x1, y1, x2, y2, th), y2+diffy(x1, y1, x2, y2, th)];
function point4(x1, y1, x2, y2, th) = [x1+diffx(x1, y1, x2, y2, th), y1+diffy(x1, y1, x2, y2, th)];
function polarX(theta) = cos(theta)*r(theta);
function polarY(theta) = sin(theta)*r(theta);
module nextPolygon(x1, y1, x2, y2, x3, y3, th) {
if((x2 > x1 && x2-diffx(x2, y2, x3, y3, th) < x2-diffx(x1, y1, x2, y2, th) || (x2 <= x1 && x2-diffx(x2, y2, x3, y3, th) > x2-diffx(x1, y1, x2, y2, th)))) {
polygon(
points = [
point1(x1, y1, x2, y2, th),
point2(x1, y1, x2, y2, th),
// This point connects this segment to the next
point4(x2, y2, x3, y3, th),
point3(x1, y1, x2, y2, th),
point4(x1, y1, x2, y2, th)
],
paths = [[0,1,2,3,4]]
);
}
else if((x2 > x1 && x2-diffx(x2, y2, x3, y3, th) > x2-diffx(x1, y1, x2, y2, th) || (x2 <= x1 && x2-diffx(x2, y2, x3, y3, th) < x2-diffx(x1, y1, x2, y2, th)))) {
polygon(
points = [
point1(x1, y1, x2, y2, th),
point2(x1, y1, x2, y2, th),
// This point connects this segment to the next
point1(x2, y2, x3, y3, th),
point3(x1, y1, x2, y2, th),
point4(x1, y1, x2, y2, th)
],
paths = [[0,1,2,3,4]]
);
}
else {
polygon(
points = [
point1(x1, y1, x2, y2, th),
point2(x1, y1, x2, y2, th),
point3(x1, y1, x2, y2, th),
point4(x1, y1, x2, y2, th)
],
paths = [[0,1,2,3]]
);
}
}
module 2dgraph(bounds=[-10,10], th=2, steps=10, polar=false, parametric=false) {
step = (bounds[1]-bounds[0])/steps;
union() {
for(i = [bounds[0]:step:bounds[1]-step]) {
if(polar) {
nextPolygon(polarX(i), polarY(i), polarX(i+step), polarY(i+step), polarX(i+2*step), polarY(i+2*step), th);
}
else if(parametric) {
nextPolygon(x(i), y(i), x(i+step), y(i+step), x(i+2*step), y(i+2*step), th);
}
else {
nextPolygon(i, f(i), i+step, f(i+step), i+2*step, f(i+2*step), th);
}
}
}
}
 member dnewman's 3dplot.scad and place it in the same directory as your OpenSCAD file that will use it.
member dnewman's 3dplot.scad and place it in the same directory as your OpenSCAD file that will use it.



{kind=link}